
Micropilot MP2028 Review - Part 1
I’m lucky enough to have the opportunity to “play” a bit with the Micropilot autopilot module and software that comes with it. While going through all the steps before we have our MAV in the air, I’ll do my best to post some of my experiences on my weblog. Part one! A first glimpse at the autopilot.
The module itself looks very professional: All paths are in an inner layer, so none is visible. On top of that, a special coating layer is covering the PCB.
Some chips on the module caught my attention:
- Sipex UART to RS232 on-board : Isn’t it odd that they use RS232 on the module and not just TTL to communicate with the modem (which also contains a RS232 to TTL chip) and PC?
- MAX660 Switched Capacitor Voltage Converter I have no idea what they use that for
- Cirrus Logic AD convertor This is just a normal AD-convertor
- LCX14 Standard hex invertor
- A 49.1uH inductor . I suppose that is for filtering? I’m not familiar with other uses of an inductor…
- 3 gyroscopes and 2 accelerometers. The Analog Devices ones you find in most IMU’s.
- One static and one dynamic pressure sensor. Also looks very standard.
- XC9536XL High Performance CPLD This is a Xilinx FPGA. High performance, low power.
- M410000025: This is RAM. I have on idea how much…
- The main processor is a FreeScale one. I didn’t rip off the sticker on it to see which one :-)
- Commonly used TIM GPS module from u-blox.
- The servo board contains the 17HCT237 to demultiplex a 3-bit data input to 8 data output (to the servos)
Most of these components are pretty standard, but it is clear that this module has quiet some processing power!
The weight of the module is only 28 grams. Unfortunately, the standard GPS antenna that comes with it is 38 grams! The interconnecting cables that come with it aren’t made for weight-saving either. So if we want a really low weight, we’ll have to come up with some ideas ourselves. The manual refers us to the website for solutions for these kind of issues, but I haven’t gotten my Support ID yet to log in.
Speaking of the manual: it looks very complete (160+ pages) and there is even an instruction video explaining the basic setup procedures. Compared to some other autopilot modules i’ve seen, it all looks very complete and professional.
Every parameter of the numerous PID loops it contains is configurable, including min and max settings, which PID loop to use at what speed and some others I never even thought of myself (and still need to find the use of it ;-) ). For automatic take-off, there are also a lot of options.
The back of the module, with the servo board next to it:
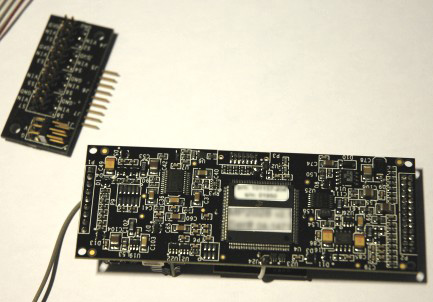
The front of the module, with a small part of the cables mess to interconnect everything:

More to come! If you’d like me to cover a certain topic of the micropilot, let me know!
|