
gluonpilot.com
After a weekend (or two) of hard work, I’m proud to announce a new website: gluonpilot.com. It contains a wiki and a forum.
The account you create on the forum is also valid on the wiki (ask wiki rights if you haven’t got them automatically :-) ).
From now on, all my UAV-related posts will be on this site.
Also, I invite every one of you to enter the discussion or ask any questions you might have on the forum. Don’t be shy! Let’s build a community!
Gluonpilot
A new child is born!
From now on, the hardware module will be known as GluonPilot.
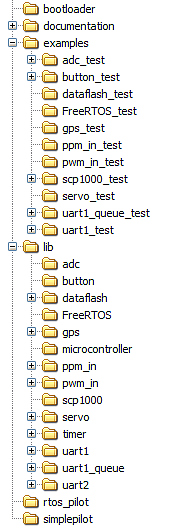
A project has been created on google code. Until now, the first release only contains libraries and examples. I’m in the progress of re-writing portions of the current autopilot firmware to make sure it’s more modular, more easy to understand… so basically just better!
A forum will should be up and running shortly. If you’d have any ideas/remarks: please let me know!
Contact
There was problem with the contact form.
If you want to send me an email, just use your regular email client!
tom add pycke dot be
New hardware!
After a long struggle (which isn’t over yet), my new hardware finally arrived:
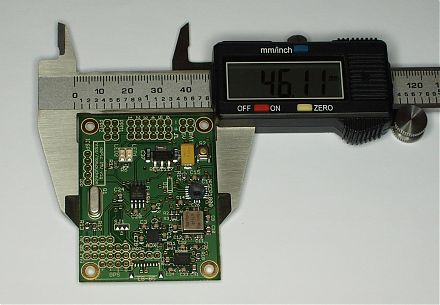
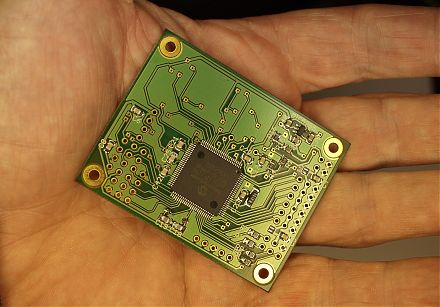
Designed to be as small and lightweight as possible: the weight is 8.6grams with a size of 46×59mm. The cool thing is that the profile of this board is only 6mm thick. This makes it also perfect for small UAV’s.
This high-precision yaw rate gyro makes this board a nice candidate for your next quadrocopter as well :-)
Its features are an extention of my previous versions:
- 6DOF IMU (3 gyros and 3 accelerometers)
- 16-bit pressure sensor for height
- can control 6 servo
- RC-transmitter input through PPM or PWM (4 channels)
- a push button
- 2 LEDs
- 4MB flash for datalogging and configuration
- 256kB flash for code
- works with EB-85 GPS and other (4-pin) GPS modules
- connects to your PC using the standard FTDI USB data cable
- SPI, I2C, UART headers available for communication with other devices
And last but not least: the software
- Easy to use libraries for all hardware
- 11 simple demo applications for every hardware component
- a simple autopilot
- a more complex autopilot using FreeRTOS (work in progress)
- all code nicely documented
However, still a lot of work has to be done. Attitude estimation needs to be improved, and a nice configuration tool would rock! It would be great if some people would show interest to join me in this effort!
Interested in joining or just in the board? Contact me